Anpassbarer Linearförderer mit Zirkulationseinheit
Eigenschaften
- Wiederholgenauigkeit: ± 5 μm
- Maximale Geschwindigkeit: 2500 mm/s
- Maximale Nutzlast: 15 kg
- Modullänge: 200 mm / 300 mm / 500 mm / 1000 mm
- Minimaler Abstand zwischen den Slidern (Mitte zu Mitte): 210 mm
Keine Fahrt zum Ursprung erforderlich
Der neu entwickelte, hochpräzise Full-Range-Absolutwert-Server macht einen Return-to-Origin-Prozess überflüssig. Der Betrieb kann einfach gestartet und gestoppt werden, so dass auch beim Start oder Neustart kein Zeitverlust entsteht.
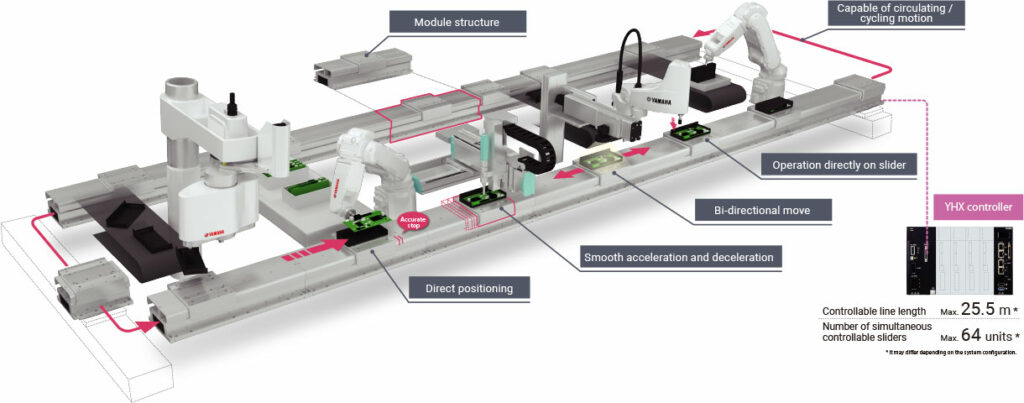
Einfacher modularer Anschluss mit Verbindungsplatte und Anschlusseinheit
Mechanische Verbindung durch Connecting Plates und Signalkommunikation durch Connecting Units. Einfache und dennoch sichere Verbindungsmethode des modularen Systems.
Flacher Aufbau
Durch den Einsatz eines neu entwickelten Linearmotors ist die Modulhöhe im Vergleich zum LCM100 um ca. 30 % geringer. Der Platz unter dem Rahmen kann effektiv genutzt werden.
Eingebauter Treiber spart elektrische Verkabelung
Der Motortreiber ist im Modul eingebaut und das gesamte LCMR200 wird vom YHX-Controller über das YQLink-Kabel gesteuert. Dies trägt auch zur Platzersparnis im Schaltschrank bei.
Alle Slider können unabhängig voneinander bedient / programmiert werden
Geschwindigkeit und Beschleunigung sind bei jedem Slider einzeln programmierbar, da alle Slider separat per ID gesteuert werden können.
Mechanische Toleranz zwischen den Slidern +/-30 μm (Dübellochstandard)
Aufgrund der maschinellen Genauigkeit hat jeder Slider seine eigene Toleranz an einem Haltepunkt, jedoch kann das LCMR200 den Unterschied zwischen den Slidern auf +/-30 μm begrenzen und ist für hochpräzise Prozesse geeignet. Da RFID etc. nicht notwendig ist, ist eine Kostenreduzierung möglich.
Konzentrierte Steuerung durch den YHX-Controller mit YHX-Standardprofil
Einschließlich der Betriebsumgebung können alle Slider und Einachsroboter am Transferprozess gesteuert werden. Mit dem YHX-Standardprofil kann eine Projektdatei für LCMR200 erstellt werden, die einen einachsigen Roboter und LCMR200 als Positionierer über ein Feldnetzwerk der Host-SPS bewegt.
LCMR200-Demo-Maschine
By loading the video, you agree to YouTube’s privacy policy.
Learn more
Produktionslinie mit vertikalem Kreislauf
By loading the video, you agree to YouTube’s privacy policy.
Learn more
Downloads
