Collaborative Robot COBOTTA
With just 4 kg of weight, its integrated controller, and state-of-the-art safety concept, this robot revolutionizes the way humans and machines collaborate. Designed to interact with human operators in a shared workspace, it combines advanced technology with a strong emphasis on safety. This collaborative robot is not only agile and precise but also features a comprehensive range of safety functions to ensure a secure work environment. From assembly tasks to complex handling operations, this robot is the perfect companion to increase productivity while ensuring the well-being of your employees. Experience the future of collaborative robotics with this compact and intelligent solution.
Specs
| Model | COBOTTA |
| Arm Reach | 342.5 mm (TCP 385 mm) |
| Payload | 0.5 kg (*0.7 kg wrist direction downward within ± 10 degrees) |
| Repeatability | ± 0.05 mm |
| Weight incl. Controller | 4 kg |
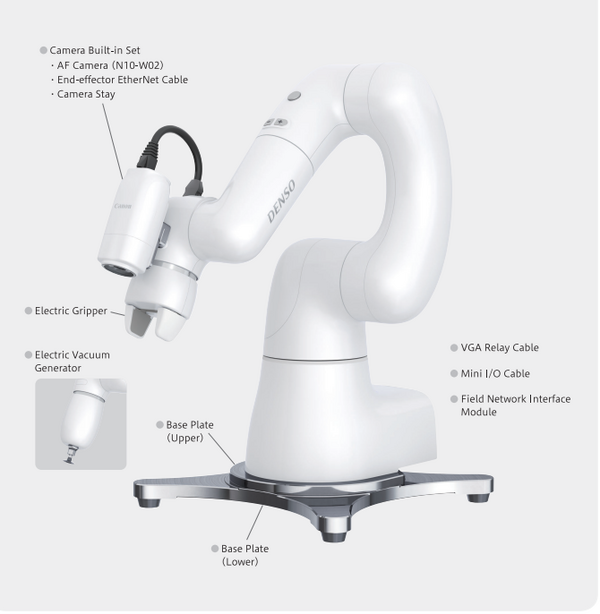
| Options | Built-in Electrical Gripper (force controlled) Built-in Electrical Vacuum Generator / Vacuum Gripper Built-in A/F 2D Camera |

Highlights

Transporting and installing COBOTTA anywhere anytime is simply easy.
Easy to install e.g. on trolley or AGV/mobile robot
No additional wiring between arm and controller

Wide possibilities to use COBOTTA – from first time user to robot expert
Individual development environment (Linux+ROS)
Usable with all TCP/IP devices

Transporting and installing COBOTTA anywhere anytime is simply easy.
Easy to install e.g. on trolley or AGV/mobile robot
No additional wiring between arm and controller

Easy programming with tablet based App Cobotta World
Set up a new program within minutes
Teach COBOTTA by moving it directly and selecting tasks from the preset job items

Robot arm weight with controller only 4 kg
Small space needed: approx. 200cm²
Easy transportation
Ext. Communication: Ethernet TCP/ IP, 2 x USB, Field Network: EtherCAT, ProfiNET, EtherNet IP External I/ O: 20 Input/ 20 Output

Inherently safe design – No sharps or pinch points
Functional safety- Safety-rated monitored function (all axis)
Power and force limiting concept rel. to ISO / TS15066 and ISO 10218-1
Safety level PL d / Cat 3 (ISO 13849)
TÜV Rheinland certified acc. to int. standards for the safety of industrial robots
Product features and Options
The Collaborative Robot COBOTTA stands out for its low weight of only 4 kg and is easy to transport. It features an integrated controller and a comprehensive safety concept. Operating the COBOTTA is made easy thanks to the user-friendly “COBOTTA World” app, which provides a graphical interface. Typical handling and pick-and-place tasks can be easily created using this app on a tablet. The COBOTTA is designed as an open platform and can be flexibly integrated into existing systems.
With a payload capacity of up to 500 g (up to 700 g when the 5th axis is oriented vertically or downwards) and its compact design, the COBOTTA is particularly well-suited for work in limited spaces and direct collaboration with humans.
Safety in collaboration with humans is of paramount importance. The Collaborative Robot COBOTTA ensures safety through an inherently secure design and continuous monitoring of torques and speeds on all axes.
Even the electric gripper and integrated cameras on the robot arm are integrated into the safety concept. This enables the creation of both force-controlled gripping applications and image recognition applications (2D) quickly and easily. With the additional “Remote TP” app, experts can create complex applications using the DENSO robot programming language PacScript and a virtual robot teach pendant.
The COBOTTA is available in various configurations, including a version with a vacuum gripper and a fieldbus adapter (ProfiNet, EtherCAT, Ethernet IP).
By loading the video, you agree to YouTube’s privacy policy.
Learn more